KCGI・KCG・株式会社ヒューマン エンジニアリング アンド ロボティックス(大阪市淀川区)の産学連携チーム(チーム名:京魂英雄 きょうこんひーろー)が,去る10月29日(水)に東京代々木の国立オリンピック記念青少年総合センターで開かれた「MDDロボットチャレンジ2008」(情報処理学会組込みシステム研究会主催)の自動航法競技で優勝しました。

「MDDロボットチャレンジ」とは,小型飛行船を制御するソフトウェアをモデル駆動開発(Model Driven Development)に従って開発し,その過程で得られるモデル(ソフトウェアの設計図)や実際の飛行競技をコンテスト形式で競います。研究促進,産業振興,教育実践のすべてを達成することを目的としています。
大会にはモデル審査・自動航法競技・相撲競技の3種目があります。今回,わがチームが優勝した自動航法競技は,飛行船を出発地から離陸して立ち寄り点を通過しながら,目的地に着陸させることの正確さを競います。
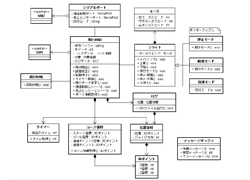
地上には超音波センサが配置されており,それによって飛行船は自分のいる位置を検知して,自動操縦用のノートパソコンに送信します。ノートパソコンは位置情報をもとに,プロペラを制御する命令を飛行船に送ります。これらの手順で,離陸の命令のみを人が行い,それ以後は全自動の制御で行うという高度なプログラミング開発が必要です。
本学チームの飛行では競技直前まで調整が続き,期待と不安の入り混じったスタートとなりました。離陸後,第一通加点を無事に通過して第二通過点の通過はかろうじてうまく通過したあとは飛行経路を大きくはずれて,目的地への着陸は果たせなかったものの,競技時間内での不時着陸には成功しました。参加全チーム中最高得点の9ポイント(2位は4ポイント)を獲得し,見事優勝を果たしました。
MDDロボットチャレンジ競技の種類
【自動航法競技】

自動航法競技では,飛行船を出発地から離陸し,決まったポイントを通過しながら目的地に着陸する様に航行させる事を競います。地上には超音波センサが配置されており,それによって飛行船は自分のいる位置を検知して,基地局にあるノートパソコンに送信します。基地局は位置情報をもとに,プロペラを制御する命令を飛行船に送ります。これらの手順で,飛行船は自動制御で飛行出来るようになっています。
【モデル審査】
MDDロボットチャレンジは,単に飛行船を飛ばすのではなく,モデルすなわちソフトウェアの設計図に基づくソフトウェア開発を推進してソフトウェアの品質を高めるためのコンテストです。そのため,大会では事前提出されたモデルの審査も行われます。
プロジェクトの規模が大きくなり大人数のエンジニアで開発する必要が増えている現在,文書化やモデル化など,言葉や図を用いてプロジェクトの方向性や目標を明確にするためのコミュニケーションが必要とされつつあります。
【相撲競技】
1対1で争う。それぞれの飛行船が後部に長いリボンを付けて,相手のリボンに先に触った飛行船が勝ちとなります。なお,勝負開始の離陸後は,リボンを含めた機体が周囲の壁や床に接触すると負けです。試合時間は5分。制御コントローラは各チームで準備。マウスやキーボードで操作するチーム,ゲームのコントローラやジョイスティックを使うチーム,自作コントローラで挑んだチームなど様々です。
本プロジェクトに関わったメンバー
- 京都情報大学院大学
- 高橋修司,真尾朋行,藤波光,内舘隼,村上智史,高瀬えりか,坂本雅洋,後藤洋信,江見圭司
- 京都コンピュータ学院
- 吉田鐘一
- 株式会社ヒューマン エンジニアリング アンド ロボティックス
- 西村憲二,高橋嘉也,岡部拓也,古川彬,岡村勝