KCGI - KCG - Công ty TNHH Kỹ thuật và Robotics (Phường Yodogawa thành phố Osaka), một nhóm hợp tác trong ngành học thuật (tên đội: Kyotama Hideo Kyoko Konhiro) đã được tổ chức tại Trung tâm Thanh niên Thế vận hội Tưởng niệm Thế vận hội ở Yoyogi, Tokyo vào thứ Tư, 29 tháng 10. Thử thách Robot MDD 2008 "( Hiệp hội xử lý thông tin Nhật Bản Nhóm nghiên cứu hệ thống nhúng (Được tài trợ) cạnh tranh điều hướng tự động.

Robot MDD Thử thách Robot là sự phát triển phần mềm để điều khiển khí cầu nhỏ theo Mô hình phát triển theo mô hình và cạnh tranh trong cuộc thi dành cho các mô hình (bản vẽ thiết kế phần mềm) có được trong quá trình và các cuộc thi bay thực tế. .Mục đích là để đạt được tất cả các hoạt động xúc tiến nghiên cứu, phát triển công nghiệp và thực hành giáo dục.
Có ba loại giải đấu: đánh giá mô hình, thi đấu điều hướng tự động và thi đấu sumo.Cuộc thi điều hướng tự động mà nhóm chúng tôi giành được lần này cạnh tranh về tính chính xác của việc hạ cánh trên khinh khí cầu trong khi cất cánh từ điểm khởi hành và vượt qua điểm dừng.
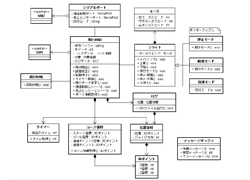
Một cảm biến siêu âm được đặt trên mặt đất, cho phép khí cầu phát hiện vị trí của nó và gửi nó đến một máy tính xách tay để tự động lái.Dựa trên thông tin vị trí, máy tính xách tay sẽ gửi các lệnh để điều khiển cánh quạt đến khí cầu.Với các quy trình này, việc phát triển lập trình nâng cao là cần thiết, trong đó chỉ có một lệnh cất cánh được thực hiện bởi một người và sau đó, điều khiển hoàn toàn tự động được thực hiện.
Trong chuyến bay của đội chúng tôi, sự điều chỉnh tiếp tục cho đến trước cuộc thi, và đó là một khởi đầu với những kỳ vọng và lo lắng lẫn lộn.Sau khi cất cánh, sau khi vượt qua điểm đậu thứ nhất một cách an toàn và vượt qua điểm đậu thứ hai vừa đủ, đường bay bị lệch rất nhiều và không thể hạ cánh ở đích mà không thực hiện được trong thời gian thi đấu. Hạ cánh thời gian đã thành công.Đội ghi được 9 điểm (4 điểm ở vị trí thứ 2), điểm cao nhất trong số tất cả các đội tham gia.
Các loại cạnh tranh thách thức robot MDD
[Cuộc thi điều hướng tự động]

Trong cuộc thi điều hướng tự động, khinh khí cầu cất cánh từ điểm xuất phát của nó và cạnh tranh để đưa nó hạ cánh xuống đích đến trong khi đi qua một điểm định trước.Một cảm biến siêu âm được đặt trên mặt đất, cho phép khí cầu phát hiện vị trí của nó và gửi nó đến máy tính xách tay ở trạm gốc.Trạm cơ sở gửi lệnh để điều khiển cánh quạt đến khí cầu dựa trên thông tin vị trí.Với các thủ tục này, khinh khí cầu có thể bay tự động.
[Đánh giá mẫu]
MDD Robot Challenge là một cuộc thi để cải thiện chất lượng phần mềm bằng cách thúc đẩy phát triển phần mềm dựa trên các mô hình, nghĩa là các bản vẽ thiết kế phần mềm, thay vì chỉ đơn giản là lái một chiếc khinh khí cầu.Do đó, các mô hình nộp trước sẽ được xem xét tại hội nghị.
Bây giờ quy mô của dự án ngày càng tăng và nhu cầu phát triển của một số lượng lớn các kỹ sư ngày càng tăng, cần có sự giao tiếp để làm rõ định hướng và mục tiêu của dự án bằng cách sử dụng từ ngữ và sơ đồ như tài liệu và mô hình. Nó đang diễn ra.
[Cuộc thi Sumo]
Chiến đấu một chọi một.Mỗi chiếc khinh khí cầu gắn một dải ruy băng dài ở phía sau và chiếc khinh khí cầu chạm vào dải băng của đối thủ sẽ giành chiến thắng trước.Sau khi cất cánh, máy bay bao gồm ruy băng sẽ mất nếu chạm vào các bức tường hoặc sàn xung quanh.Thời gian trò chơi là 5 phút.Bộ điều khiển được chuẩn bị bởi mỗi đội.Các đội hoạt động bằng chuột hoặc bàn phím, các đội sử dụng bộ điều khiển trò chơi hoặc cần điều khiển và các đội tự thử thách bản thân với bộ điều khiển riêng.
Các thành viên tham gia dự án này
- Trường Sau Đại học Công nghệ Thông tin Kyoto
- Shuji Takahashi, Takeyuki Mano, Hikaru Fujinami, Nagisa, Satoshi Murakami, Erika Takase, Masahiro Sakamoto, Hironobu Goto, Emi Junji
- Học viện Máy tính Kyoto
- Kanichi Yoshida
- Công ty TNHH Kỹ thuật Con người và Người máy
- Kenji Nishimura, Yoshiya Takahashi, Takuya Okabe, Jun Furukawa, Masaru Okamura